Exploring assembly oriented design in 3D printing through vertical stackable modules. Work by Gali Schechner, the architectural studio ‘From Geomaterials to Architectural Structures’.
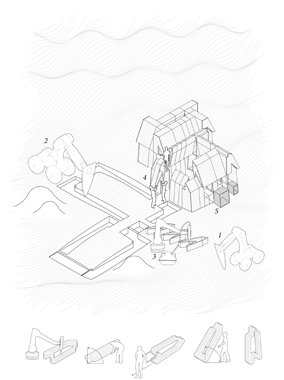
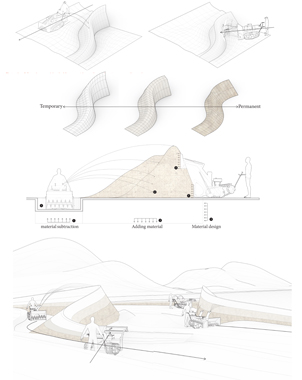
A diagram exemplifying the proposed procedural process for
geomaterial-reconstitution: (1, 2) preparatory earthworks – groundscaping and
building contour subtraction; (3) 3D printing of the building elements; (4,
5) system assembly and opening fixtures. Work by student Gali Schechner.
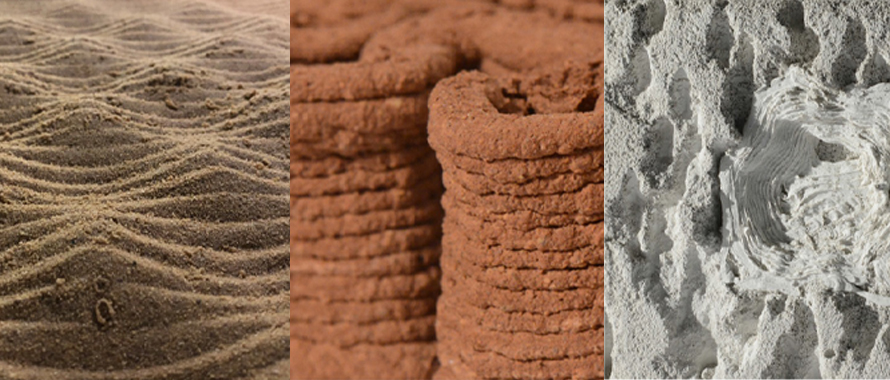
Case studies towards territorial-based robotic fabrication. Left-toright: informed ground, reconstituted material, and Carve-to-Print protocol.
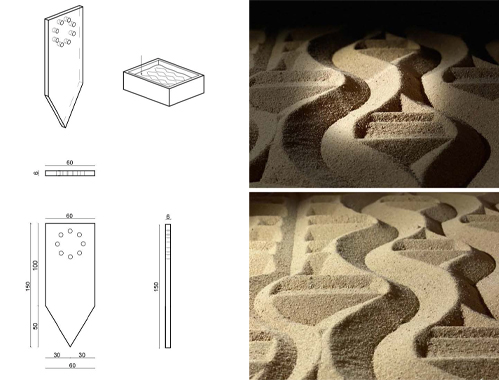
Linear motion strokes for forming divisions in the
sand with flat end effector and pointed edge. Project
by Hala Hamza, Ranim Jafar, Juan Marjieh, Fadi Zaher.
Robotic cell for 3D printing and sand forming. The setup includes
a KUKA KR6, a custom extruder, and a Kinect sensor.
Various soils at the explored site in the Ramon Crater, Negev
Desert, Israel, and the results of two 3D printing mixtures.
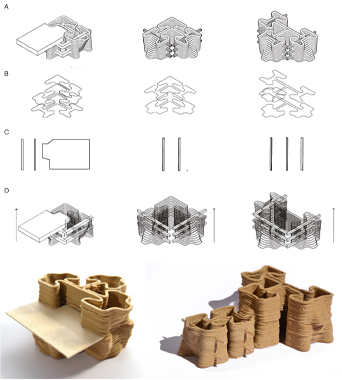
A catalog of the parametric elements and the 3D printing process
and resulting scale models. Work by Noa Gigi, architectural studio titled ‘From
Geomaterials to Architectural Structures’.
Proposed fabrication method: subtractive snow plowing, followed
by snow spraying and throwing, concluded with pressing for stabilziing the
snow formations.Work by students Noa Gigi and Yarden
Elah, Robotics, Architecture, and Environment Seminar, and the Azrieli Global
Studio.
Abstract
Architecture and site have been linked since the dawn of civilization, as early societies adapted their environments using found materials and developed custom tools towards construction. However, the tradition of sourcing local materials diminished dramatically with the advent of industrialization and the ease of transporting materials to construction sites. In the past decade, robotic tools have been permeating the field of architecture, reconnecting makers and matter. The advent of in situ robotic tools offers to further deepen this connection by performing fabrication on-site. This critical capacity provides the possibility to transform terrains and modulate native matter into architectural grounds and structures.
Under the environmental imperative to reconsider material sourcing, and with the pressing need to develop alternatives to the rapidly depleting construction sand, architects are assuming a resource-conscious approach. The thesis seeks to advance this approach and forwards a vision for post-Anthropocene, large-scale, architectural, and landscape construction – territorial-based digital fabrication. This vision seeks to shift the focus of digital fabrication in architecture from an object-oriented process to an environment-directed endeavor.
To this end, the thesis explores four aspects: Informing Grounds – the capacity to embed information in sand and soil; Customizing Territories – the modulation of terrains into performative grounds and structures; Reconstituting Geomaterials – the transformation of geomaterials into architectural elements and systems using additive manufacturing; and Contextualizing Additive Construction – the tailoring of the production process to the site. These issues bridge disparate research avenues – the automation of earthworks, the robotic forming of landscapes, in situ resource utilization, and on-site robotic construction. The thesis contributes conceptual, theoretical, and methodological foundations for performing territorial-based robotic fabrication. Based on the experimental investigation of the presented case studies, it develops, demonstrates, and discusses territorial-based strategies. These include experimental frameworks, workflows, methods, protocols, technical setups, and expanded terminology. The thesis concludes with the notion of Matter-to-Structure, anchoring digital fabrication in the territory it is situated in and linking terrains, found matter, and the architecture they nurture.